|
YARP
Yet Another Robot Platform
|

|
|
YARP
Yet Another Robot Platform
|
|
#include <yarp/dev/INavigation2D.h>
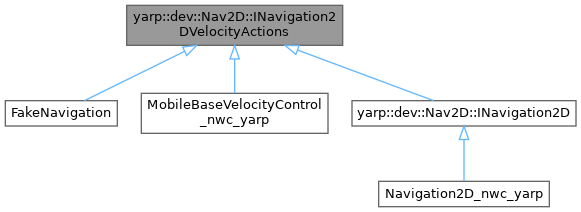
 Inheritance diagram for yarp::dev::Nav2D::INavigation2DVelocityActions:
Inheritance diagram for yarp::dev::Nav2D::INavigation2DVelocityActions:Public Member Functions | |
| virtual | ~INavigation2DVelocityActions () |
| Destructor. | |
| virtual yarp::dev::ReturnValue | applyVelocityCommand (double x_vel, double y_vel, double theta_vel, double timeout=0.1)=0 |
| Apply a velocity command. | |
| virtual yarp::dev::ReturnValue | getLastVelocityCommand (double &x_vel, double &y_vel, double &theta_vel)=0 |
| Returns the last applied velocity command. | |
Definition at line 66 of file INavigation2D.h.
|
inlinevirtual |
Destructor.
Definition at line 72 of file INavigation2D.h.
|
pure virtual |
Apply a velocity command.
Velocities are expressed in the robot reference frame.
| x | [m/s] |
| y | [m/s] |
| theta | [deg/s] |
| timeout | The velocity command expires after the specified amount of time (by default 0.1 seconds) |
Implemented in FakeNavigation, MobileBaseVelocityControl_nwc_yarp, and Navigation2D_nwc_yarp.
|
pure virtual |
Returns the last applied velocity command.
| x | [m/s] |
| y | [m/s] |
| theta | [deg/s] |
Implemented in FakeNavigation, MobileBaseVelocityControl_nwc_yarp, and Navigation2D_nwc_yarp.