|
| | FakeJointCoupling ()=default |
| |
| virtual | ~FakeJointCoupling ()=default |
| |
| bool | open (yarp::os::Searchable &par) override |
| | Open the DeviceDriver.
|
| |
| bool | close () override |
| | Close the DeviceDriver.
|
| |
| bool | convertFromPhysicalJointsToActuatedAxesPos (const yarp::sig::Vector &physJointsPos, yarp::sig::Vector &actAxesPos) override |
| |
| bool | convertFromPhysicalJointsToActuatedAxesVel (const yarp::sig::Vector &physJointsPos, const yarp::sig::Vector &physJointsVel, yarp::sig::Vector &actAxesVel) override |
| |
| bool | convertFromPhysicalJointsToActuatedAxesAcc (const yarp::sig::Vector &physJointsPos, const yarp::sig::Vector &physJointsVel, const yarp::sig::Vector &physJointsAcc, yarp::sig::Vector &actAxesAcc) override |
| |
| bool | convertFromPhysicalJointsToActuatedAxesTrq (const yarp::sig::Vector &physJointsPos, const yarp::sig::Vector &physJointsTrq, yarp::sig::Vector &actAxesTrq) override |
| |
| bool | convertFromActuatedAxesToPhysicalJointsPos (const yarp::sig::Vector &actAxesPos, yarp::sig::Vector &physJointsPos) override |
| |
| bool | convertFromActuatedAxesToPhysicalJointsVel (const yarp::sig::Vector &actAxesPos, const yarp::sig::Vector &actAxesVel, yarp::sig::Vector &physJointsVel) override |
| |
| bool | convertFromActuatedAxesToPhysicalJointsAcc (const yarp::sig::Vector &actAxesPos, const yarp::sig::Vector &actAxesVel, const yarp::sig::Vector &actAxesAcc, yarp::sig::Vector &physJointsAcc) override |
| |
| bool | convertFromActuatedAxesToPhysicalJointsTrq (const yarp::sig::Vector &actAxesPos, const yarp::sig::Vector &actAxesTrq, yarp::sig::Vector &physJointsTrq) override |
| |
| | DeviceDriver () |
| |
| | DeviceDriver (const DeviceDriver &other)=delete |
| |
| | DeviceDriver (DeviceDriver &&other) noexcept=delete |
| |
| DeviceDriver & | operator= (const DeviceDriver &other)=delete |
| |
| DeviceDriver & | operator= (DeviceDriver &&other) noexcept=delete |
| |
| virtual | ~DeviceDriver () |
| |
| virtual std::string | id () const |
| | Return the id assigned to the PolyDriver.
|
| |
| virtual void | setId (const std::string &id) |
| | Set the id for this device.
|
| |
| template<class T > |
| bool | view (T *&x) |
| | Get an interface to the device driver.
|
| |
| virtual DeviceDriver * | getImplementation () |
| | Some drivers are bureaucrats, pointing at others.
|
| |
| | ImplementJointCoupling ()=default |
| |
| virtual | ~ImplementJointCoupling ()=default |
| | Destructor.
|
| |
| void | initialise (yarp::sig::VectorOf< size_t > coupled_physical_joints, yarp::sig::VectorOf< size_t > coupled_actuated_axes, std::vector< std::string > physical_joint_names, std::vector< std::string > actuated_axes_names, std::vector< std::pair< double, double > > coupled_physical_joint_limits) |
| |
| bool | getNrOfPhysicalJoints (size_t &nrOfPhysicalJoints) override final |
| |
| bool | getNrOfActuatedAxes (size_t &nrOfActuatedAxes) override final |
| |
| bool | getCoupledPhysicalJoints (yarp::sig::VectorOf< size_t > &coupPhysJointsIndexes) override final |
| |
| bool | getCoupledActuatedAxes (yarp::sig::VectorOf< size_t > &coupActAxesIndexes) override final |
| |
| bool | getPhysicalJointName (size_t physicalJointIndex, std::string &physicalJointName) override final |
| |
| bool | getActuatedAxisName (size_t actuatedAxisIndex, std::string &actuatedAxisName) override final |
| |
| bool | getPhysicalJointLimits (size_t physicalJointIndex, double &min, double &max) override final |
| |
| | FakeJointCoupling_ParamsParser () |
| |
| | ~FakeJointCoupling_ParamsParser () override=default |
| |
| bool | parseParams (const yarp::os::Searchable &config) override |
| | Parse the DeviceDriver parameters.
|
| |
| std::string | getDeviceClassName () const override |
| | Get the name of the DeviceDriver class.
|
| |
| std::string | getDeviceName () const override |
| | Get the name of the device (i.e.
|
| |
| std::string | getDocumentationOfDeviceParams () const override |
| | Get the documentation of the DeviceDriver's parameters.
|
| |
| std::vector< std::string > | getListOfParams () const override |
| | Return a list of all params used by the device.
|
| |
| bool | getParamValue (const std::string ¶mName, std::string ¶mValue) const override |
| | Return the value (represented as a string) of the requested parameter.
|
| |
| std::string | getConfiguration () const override |
| | Return the configuration of the device.
|
| |
| virtual | ~IDeviceDriverParams () |
| |
fakeJointCoupling: Documentation to be added
The aim of this device is to mimic the expected behavior of a joint coupling device to help testing the high level software.
WIP - it is very basic now, not all interfaces are implemented yet.
Parameters required by this device are shown in class: FakeJointCoupling_ParamsParser
Definition at line 31 of file FakeJointCoupling.h.


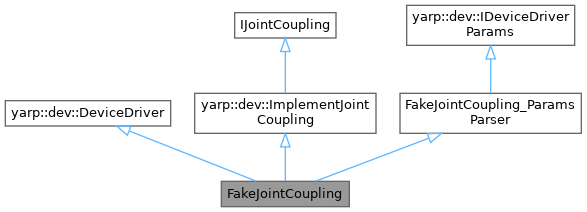
 Inheritance diagram for FakeJointCoupling:
Inheritance diagram for FakeJointCoupling: