|
YARP
Yet Another Robot Platform
|

|
|
YARP
Yet Another Robot Platform
|
|
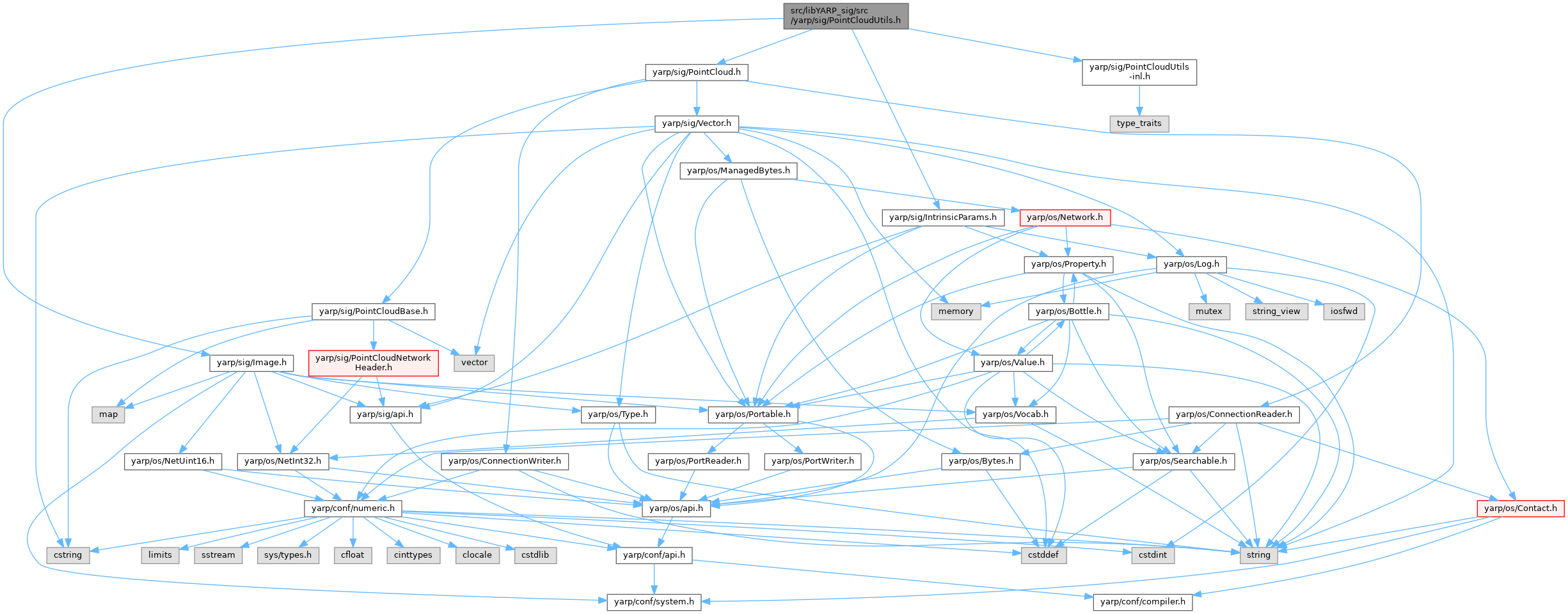
#include <yarp/sig/Image.h>#include <yarp/sig/IntrinsicParams.h>#include <yarp/sig/PointCloud.h>#include <yarp/sig/PointCloudUtils-inl.h> Include dependency graph for PointCloudUtils.h: This graph shows which files directly or indirectly include this file:
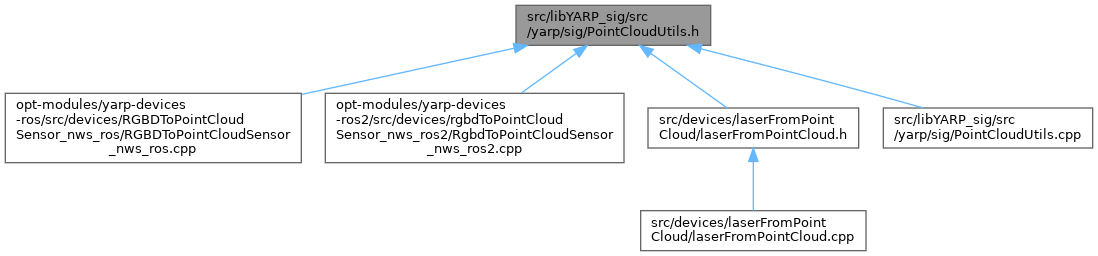
Include dependency graph for PointCloudUtils.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Classes | |
| struct | yarp::sig::utils::PCL_ROI |
Namespaces | |
| namespace | yarp |
| The main, catch-all namespace for YARP. | |
| namespace | yarp::sig |
| namespace | yarp::sig::utils |
Enumerations | |
| enum class | yarp::sig::utils::OrganizationType { yarp::sig::utils::Organized , yarp::sig::utils::Unorganized } |
Functions | |
| yarp::sig::PointCloud< yarp::sig::DataXYZ > | yarp::sig::utils::depthToPC (const yarp::sig::ImageOf< yarp::sig::PixelFloat > &depth, const yarp::sig::IntrinsicParams &intrinsic) |
| depthToPC, compute the PointCloud given depth image and the intrinsic parameters of the camera. | |
| yarp::sig::PointCloud< yarp::sig::DataXYZ > | yarp::sig::utils::depthToPC (const yarp::sig::ImageOf< yarp::sig::PixelFloat > &depth, const yarp::sig::IntrinsicParams &intrinsic, const yarp::sig::utils::PCL_ROI &roi, size_t step_x=1, size_t step_y=1, const std::string &output_order="+X+Y+Z") |
| depthToPC, compute the PointCloud given depth image, the intrinsic parameters of the camera and a Region Of Interest. | |
| template<typename T1 , typename T2 > | |
| yarp::sig::PointCloud< T1 > | yarp::sig::utils::depthRgbToPC (const yarp::sig::ImageOf< yarp::sig::PixelFloat > &depth, const yarp::sig::ImageOf< T2 > &color, const yarp::sig::IntrinsicParams &intrinsic, const yarp::sig::utils::OrganizationType organizationType=yarp::sig::utils::OrganizationType::Organized, size_t step_x=1, size_t step_y=1, const std::string &output_order="+X+Y+Z") |
| depthRgbToPC, compute the colored PointCloud given depth image, color image and the intrinsic parameters of the camera. | |