|
YARP
Yet Another Robot Platform
|

|
|
YARP
Yet Another Robot Platform
|
|
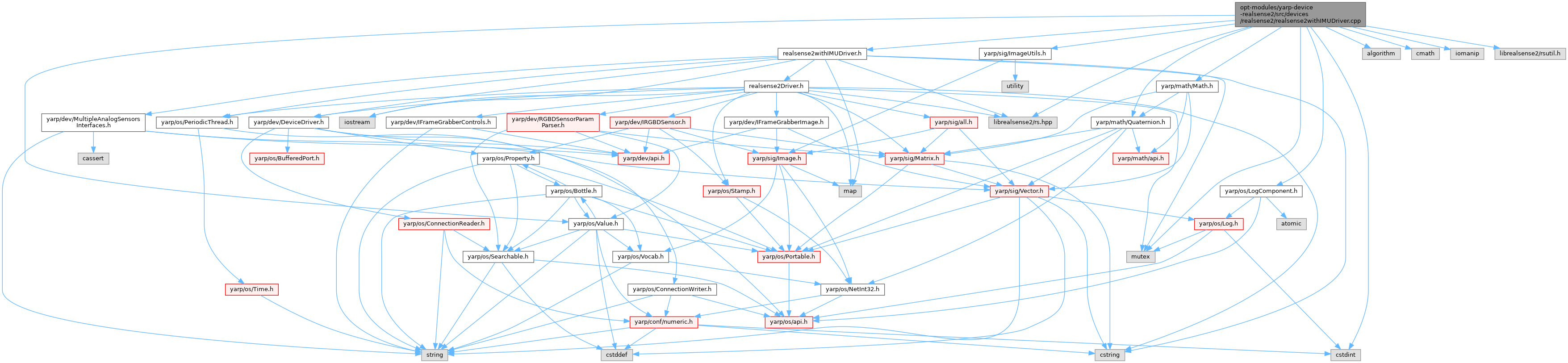
#include "realsense2withIMUDriver.h"#include <yarp/os/Value.h>#include <yarp/os/LogComponent.h>#include <yarp/sig/ImageUtils.h>#include <yarp/math/Quaternion.h>#include <yarp/math/Math.h>#include <algorithm>#include <cmath>#include <cstdint>#include <iomanip>#include <librealsense2/rsutil.h>#include <librealsense2/rs.hpp>#include <mutex> Include dependency graph for realsense2withIMUDriver.cpp:
Include dependency graph for realsense2withIMUDriver.cpp:Go to the source code of this file.
Classes | |
| struct | float3 |
| class | rotation_estimator |