|
YARP
Yet Another Robot Platform
|

|
|
YARP
Yet Another Robot Platform
|
|
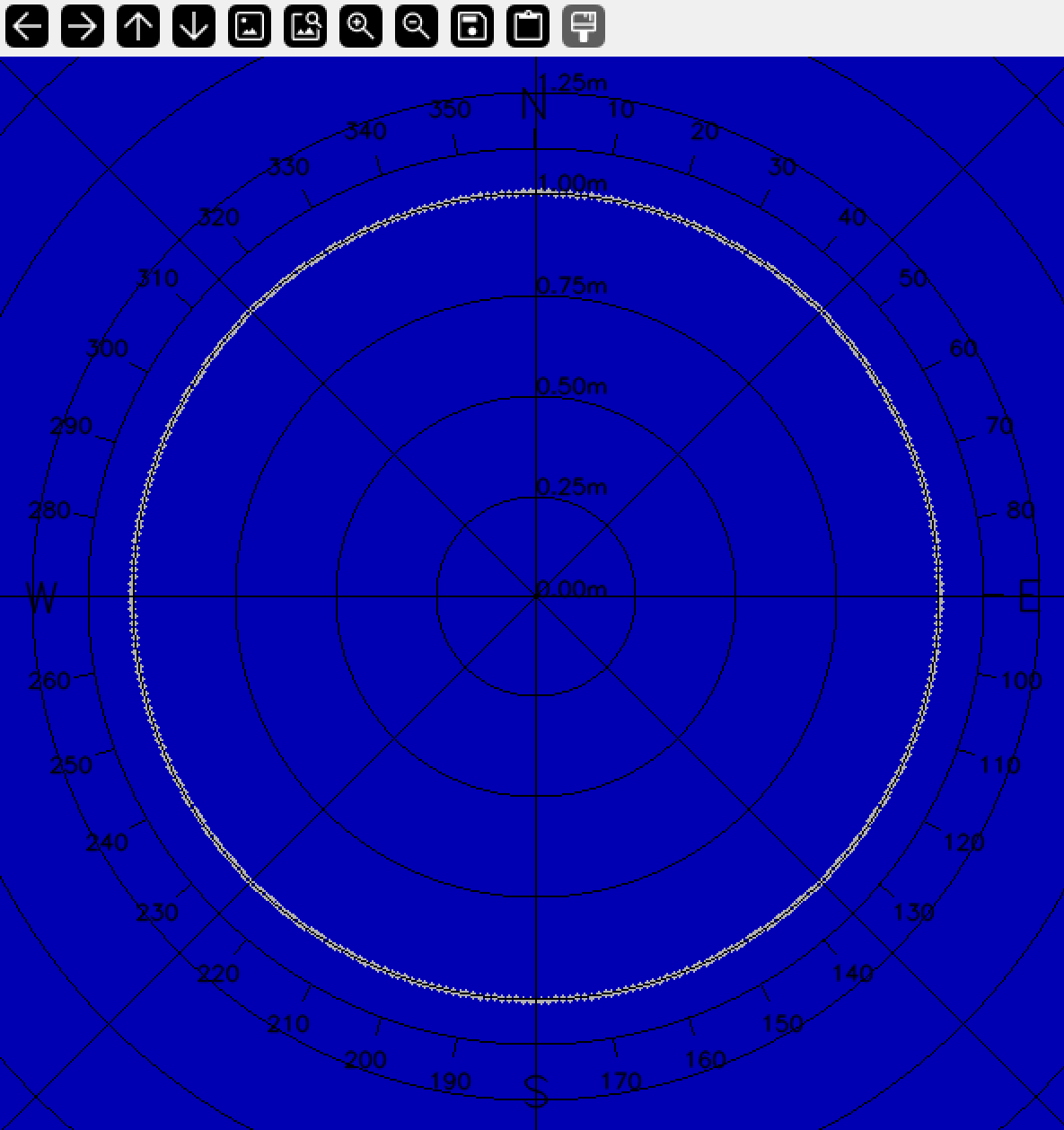
A simple GUI to display the distance measurements of a 2D laser scanner.
 Collaboration diagram for yarplaserscannergui: visualize data from a laser scanner:
Collaboration diagram for yarplaserscannergui: visualize data from a laser scanner:A simple GUI to display the distance measurements of a 2D laser scanner.
The gui display lidar measurements ( yarp::sig::LaserMeasurementData) on a polar diagram.
--scale <double> zoom factor (default 100) --robot_radius <double> the radius of the displayed robot footprint --sens_position_x <double> the position in meters of the laser center respect to the center of the robot (default 0 m) --sens_position_y <double> the position in meters of the laser center respect to the center of the robot (default 0 m) --sens_position_theta <double> the orientation in degrees of the laser sensor respect to the center of the robot (default 0 deg) --verbose <bool> toggles debug messages on/off (default false) --absolute <bool> display the laser in absolute o relative mode (default false) --compass <bool> displays the compass (default true) --period <double> the refresh period (default 50 ms) --aspect <0/1> draws line/points (default 0=lines) --sens_port <string> the name of the port used by rangefinder2D_nwc_yarp to connect to the laser device. (mandatory) --carrier <string> the name of the carrier used by rangefinder2D_nwc_yarp for connection to the server --lidar_debug shows NaN values --local <string> the prefix for the client port. By default /laserScannerGui. Useful in case of multiple instances.
Available commands (pressing the key during execution):
c ...... enables/disables compass. a ...... set absolute/relative mode. w ...... zoom in. s ...... zoom out. v ...... set verbose mode on/off. r ...... set refresh period (50/100/200ms). b ...... change aspect (lines/points)
The gui uses as Rangefinder2D_nwc_yarp device to connect to a Rangefinder2D_nws_yarp and receive data.
None.
None.
None.