|
YARP
Yet Another Robot Platform
|

|
|
YARP
Yet Another Robot Platform
|
|
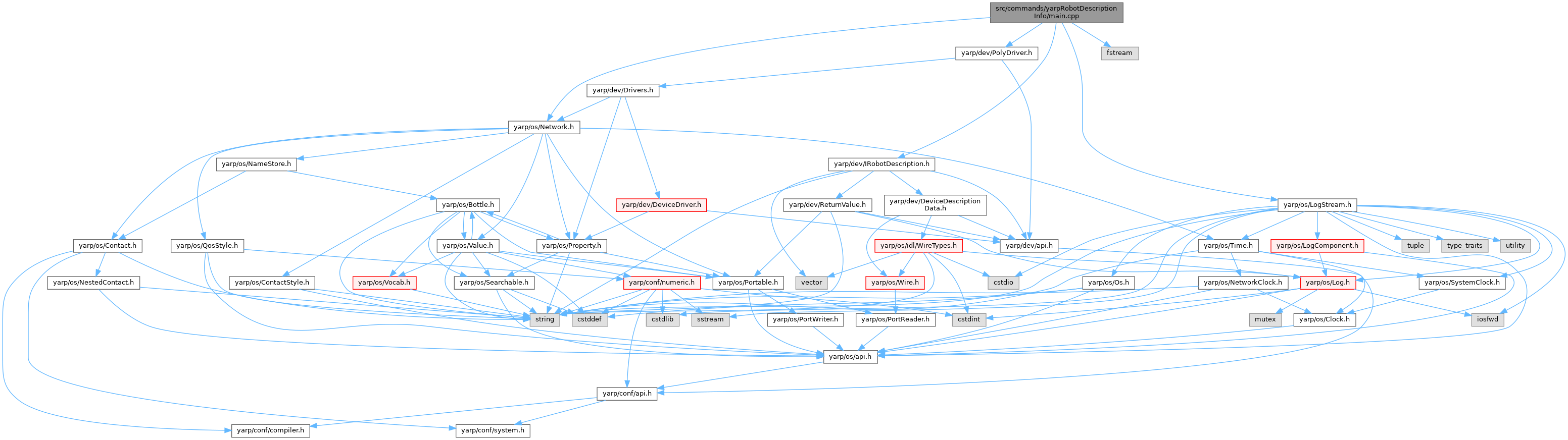
#include <yarp/dev/PolyDriver.h>#include <yarp/dev/IRobotDescription.h>#include <yarp/os/Network.h>#include <yarp/os/LogStream.h>#include <fstream> Include dependency graph for main.cpp:
Include dependency graph for main.cpp:Go to the source code of this file.
Functions | |
| void | display_help () |
| int | main (int argc, char *argv[]) |