|
YARP
Yet Another Robot Platform
|

|
|
YARP
Yet Another Robot Platform
|
|
 Collaboration diagram for yarpmobilebasegui: Control the mobile base of the robot:
Collaboration diagram for yarpmobilebasegui: Control the mobile base of the robot:A simple GUI to control the mobile base of the robot via mouse or keyboard:
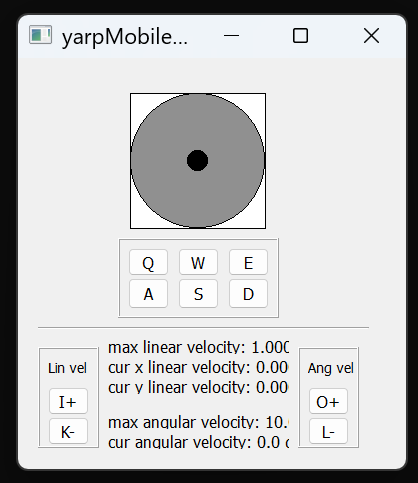
The keyboard controls are:
W,S forward/backward (x-axis) Q turn left E turn right A,D lateral (y-axis) (only holonomic robots) I,K change linear velocity O,L change angular velocity
The gui streams a yarp::dev::MobileBaseVelocity messages on a YARP port, with a default period of 10 milliseconds.
The gui accepts the following parameters:
--port <name> the full name of the output port default value: /yarpmobilebasegui:o --step_lin_vel the increase step of linear velocity (m/s) default value 0.05m/s --step_ang_vel the increase step of angular velocity (deg/s) default value 5 deg/s --default_lin_vel the default value for max linear velocity (m/s) default value: 1m/s --default_ang_vel the default value for max angular velocity (deg/s) default value: 10 deg/s